Neue Technik für die nachhaltige Landwirtschaft der Zukunft
Wissenschaftler der TU Dresden entwickeln gemeinsam mit Fraunhofer und sächsischen Mittelständlern neues Maschinenkonzept für ressourcenschonende und nachhaltige Landtechnik Größer, schneller, weiter. Die Wissenschaftler der TU Dresden brechen mit dem Paradigma, das für die bisherige technische Entwicklung der Landwirtschaft galt. Sie setzen dem weltweit steigenden Bedarf an Lebensmitteln ein völlig neues Maschinenkonzept entgegen: den selbstfahrenden Feldschwarm®.
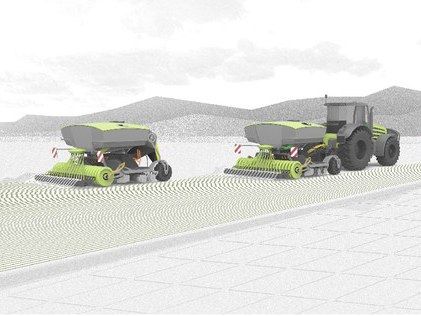
© Christoph Ph. Schreiber, Techn. Design
Der Feldschwarm® – das sind kleine, intelligente Maschineneinheiten, die sich flexibel kombinieren lassen und sich so perfekt den Umfeldbedingungen anpassen. Statt sechs bis zwölf Metern übliche Arbeitsbreite koppeln die Wissenschaftler der Professur für Agrarsystemtechnik ein, zwei oder drei technische Einheiten des Feldschwarms® und machen Produktivität in der Landwirtschaft damit skalierbar. Die neue Feldbearbeitungstechnik ist damit nicht nur sehr flexibel und hochautomatisiert, sondern schont bei gleichem Ertrag auch den Boden, erhöht die Qualität der Lebensmittel und setzt auf regenerative Antriebsenergien.
Weil beim Feldschwarm® alle Prozessschritte geplant sein müssen, wird die Produktion transparent und Nachhaltigkeit in der Landwirtschaft erstmals nachweisbar: „Wir können zu jedem Brot sagen, von welchem Feld das Getreide dafür stammt. Der Feldschwarm® kann Nachhaltigkeit in der Landwirtschaft erstmals nachweisen, so dass Konsumenten ihren Lebensmitteln endlich wieder vertrauen können“, so Prof. Thomas Herlitzius, Inhaber der Professur für Agrarsystemtechnik. „Unser Feldschwarm besetzt eine Nische zwischen der konventionellen und einer ökologischen Landwirtschaft. Die Menschen, die ein bisschen gesünder und nachhaltiger kaufen wollen, ohne gleich das doppelte bezahlen zu müssen, werden in ein paar Jahren Lebensmittel essen, die mit Feldschwarmsystemem® produziert wurden.“

Am 7. März 2019 ab 10 Uhr stellt das Feldschwarm®-Projektteam bei einer Informationsveranstaltung den aktuellen Stand der neuen Maschinenkonzepte vor. Zur Einführung und Begrüßung wird der Sächsische Staatsminister für Umwelt und Landwirtschaft Thomas Schmidt anwesend sein. Bei einem anschließenden Rundgang an vier Stationen werden Einblicke in die Forschungsergebnisse der ersten Projektetappe gegeben. Die Wissenschaftler stehen im Nachgang der Veranstaltung für Fragen zur Verfügung.
Die TU Dresden ist mit dem Feldschwarm®-Projekt im Bereich Bodenbearbeitung deutschlandweit führend. Seit zwei Jahren widmen sich die Wissenschaftler um Prof. Thomas Herlitzius an der Professur für Agrarsystemtechnik der TU Dresden gemeinsam mit sieben Unternehmen und vier Forschungsinstituten in einem regionalen Wachstumskern der autonomen und selbstorganisierten Feldbearbeitung. Bis Ende 2022 werden diese Grundlagentechnologien für autonom operierende Anbaugeräte in der Landtechnik unter dem Dach des sächsischen simul+ InnovationHub (SIH) weiterentwickelt.
Projektpräsentation:
Station 1 Werkzeugmodul
Ein zwei mal drei Meter großes Testmodell für angetriebene und gelenkte Agrarwerkzeuge verdeutlicht die Modularisierung von Feldschwarmeinheiten. Mit Hilfe eines Wechselrahmens können an das Anbaugerät die verschiedensten Werkzeugwechselmodule, wie z.B. Egge, Pflug oder Grubber angebaut werden. Koppelpunkte am Wechselrahmen ermöglichen einen Austausch der Werkzeuge ohne Montagehilfsmittel. Station 1 zeigt ein Testmodell mit einem eingebauten drei Meter breiten Zinkenmodul. Es wird live demonstriert wie zwei Module ausgetauscht werden.
Station 2 Visualisierung der Feldschwarmeinheiten und des Bedienkonzeptes
Wie werden die Gerätesysteme aussehen, die in Zukunft eigenständig über die Felder fahren und den Acker bearbeiten? Wie werden sie bedient? Live über ein Tablet kann an Station 2 die Technik von morgen gesteuert werden. Mit einer Spielsimulation können die Maschinenkonzepte virtuell erlebt und untersucht werden. Es werden Einblicke in das Bedienkonzept zukünftiger Feldschwarmeinheiten gegeben und ein maßstäbliches Modell (1:15) einer Feldschwarmeinheit ausgestellt.
Station 3 Traktionskonzept und Energieversorgung
Die Feldschwarmeinheiten werden elektrisch angetrieben. Je nachdem welches Anbaugerät genutzt wird, kommt ein großes oder kleines Antriebsmodul als Fahrwerk vor die Feldschwarmeinheit. Das große Modul mit Gleisbändern, ähnlich wie bei einem Bagger, bringt viel Leistung und eine hohe Zugkraft mit, ist aber aufgrund der Größe in seinem Bewegungsradius eingeschränkt. Es wird vor allem bei Anbaugeräten zum Einsatz kommen, die mehr Energie benötigen, wie bei der Tiefenbodenbearbeitung mittels Grubbern. Das kleine Traktionsmodul hat ein deutlich niedrigeres Masse-Leistungsverhältnis, ist mit Reifen ausgestattet und lenkbar. Aufgebaut ist ein 3 mal 2,50 m großer Prototyp des elektrischen Antriebsstranges. Auf Bildschirmen wird die zukünftige Fahrzeugtechnik in Verbindung mit den Anbaugeräten visualisiert.
Station 4 Umfelderkennung, Ortung und Schwarmführung
Die einzelnen Feldschwarmeinheiten kommunizieren über GPS und Funk. Sie stehen im ständigen Kontakt miteinander und geben in Echtzeit Rückmeldung an das Leitsystem über ihren Standort, den Fortschritt ihrer Arbeitsaufgabe und die Qualität des Arbeitsergebnisses. Die Feldschwarmeinheit erkennt ihr Umfeld und reagiert in Echtzeit auf Hindernisse oder andere Maschinen. Wie schnell die Einheit reagiert und eine Rückkopplung an das Bediensystem gibt, kann an Station 4 live getestet werden.
Die Sensoren an den intelligenten Werkzeugen geben Rückmeldung zur Qualität des Bodens an das Farm Management Informationssystem. Weiterhin ist es möglich, die Qualität des Bodens während der Bearbeitung zu analysieren und darauf aktiv zu reagieren, um den Boden z.B. optimal für die Aussaat vorzubereiten. Der Landwirt verarbeitet diese Informationen und plant auf deren Grundlage, wie das Feld bearbeitet werden muss und erstellt daraufhin den auszuführenden Arbeitsprozess für die Feldschwarmeinheiten. Die definierten Arbeitsaufgaben werden im nächsten Schritt an das Feldschwarm-Leitsystem helyOS übergeben und die individuellen Routen geplant. In dieser Software werden die einzelnen Arbeitsprozesse in Arbeitsschritte für jede Einheit spezifisch übersetzt. Das grafische Interface zur Steuerung und Überwachung des Feldschwarmes wird ebenfalls an Station 4 gezeigt.

Weitere News aus dem Ressort Wissenschaft





























































